弧焊机器人智能化离线编程系统
时间:2019-08-19 10:09来源:南京理工大学点击:4504次
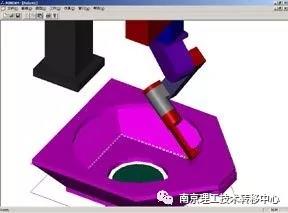
研究和开发了具有自主知识产权的适合车体等大厚件特点的弧焊机器人离线自动编程系统(TWROBCAM----computer aided-manufacture of arc-welding robot in tank),该系统可以克服示教编程的不足,可适应小批量、多品种,节省成本和时间的生产和研制要求。是基于微机的Windows系统下的机器人自动焊接CAD/WCAPP/CAM系统。它主要有机器人工作站三维造型与布局、焊接工件三维设计及造型、焊缝特征自动提取与路径规划、计算机辅助焊接工艺规划、自动编程与图形仿真系统等模块。该技术是江苏省高新项目“弧焊机器人智能化技术开发”项目的重要组成部分。
技术指标:
软件设计保证典型、单个试样焊缝在计算机上实现焊接前对焊接轨迹的准确定位。
知识产权:□发明专利 □实用新型专利 □外观专利 ■软件著作权
项目水平:□国际领先 □国际先进 ■国内领先 □国内先进
成熟程度:□原理 □样机 ■小试 □中试 □产业化
市场前景:
特别适用于需要计算机设计及焊接自动化基础与要求的企业。可适应小批量、多品种,节省成本和时间的生产和研制要求,提升企业研制水平,缩短研制周期,节约设计成本。
合作方式:合作开发、专利许可、技术转让、技术入股